咨詢熱線:
138-0656-1123

138-0656-1123

臨海市名佳自動化設備有限公司
聯系人:潘經理
手機: 189-8930-2355
電話: 0576-8590-1778
微信號:13806561123
E-mail:1159782336@qq.com
網址:www.qx91580.com
地址:浙江省臨海市東塍鎮上街工業園區前洋東路1號
名佳自動化公司是一家定制非標機械手、非標自動化設備的廠家
隨著塑料工業的發展,塑料已經成為生活及工業中利用為廣泛的高附加價值產品,由于將塑料原料制成任何一所需物品,均需要高科技技術的結合及大量的機械設備,于是也帶動了機械設備的市場。為滿足對塑料產品廣大的需求量,近年來,企業走向高品質、低成本的運作方向,也成為商業競爭中關鍵的一環。
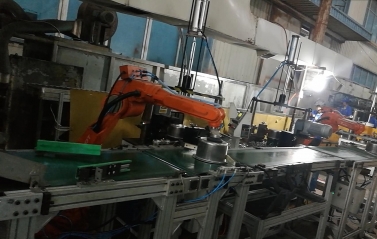
在塑料成形中又以注塑工業為廣泛,塑料成形設備除注塑機本身外,還需搭配模具及運輸工具機等接口設備,才能順利生產出所需之產品,在注塑機各項不變的條件下生產,還需人工部分即是將產品取出的動作,因此誕生了注塑機專用機械人(即機械手)。機械手是模仿人類上肢運動所設計而成的,主要目的除取代人工外,更能突破人工取出所無法完成的動作,以降低成本,縮短生產時間及品質控制。
機械手的種類:
機械手種類大致可分為簡易型機械手、多功能型機械工手及智能型機械手。
簡易型機械手的功能在于做簡單的直線運動,大部分用來取出料頭及不很復雜的產品取出(并無橫行置放功能),主要是利用液壓或風壓的原理設計而成,它具有可伸縮移動的手臂,利用自動控制裝置做簡單、規則和重復的動作,多用于點位控制,編程控制器或者微型計算機來組成控制系統,以擴展使用范圍。此種機型多用于較小型成品,只需夾取料頭,成品可自動脫模的產品種類,尤其以電子零件、連接器等產品用途廣。
多功能型機械手此機型專為較復雜的產品設計,可搭配任何不同形式的模具做生產,功能較為齊全,除本身的取出結構外,也可做橫行取出的置放,以馬達或汽缸做定位。取出的方式也可搭配可更換式治具,做不同形式及多方向之運動,利用控制系統可做X、Y軸之多點停放,可配合接口設備如輸送帶、二次加工機做多機聯機,更符合自動化需求的標準。
智能型機械手由計算機通過各種傳感器進行控制,具有視覺,熱覺和觸覺等感官功能,利用伺服馬達驅動可做無向性的取出及定位,可執行各種操作,是能力強的一種機械手,此種機型在市場需求中較不多見。
機械手的組成:
完善的機械手一般由執行系統、驅動系統、控制系統等部份組成。
執行系統:機械手抓取或釋放制品,實現各種操作運動的系統,由臂部、腕部和手部等部件組成。
注塑機所使用的機械手臂部有多種形式。一般可分為夾持式、吸附式和抱持式三種。夾持式手部的主要形式為夾鉗式,常用于抓取不易破碎或變形的制品,它對所抓取的制品的形狀有較大的適應性。夾持式手部由手指、傳動機構和驅動裝置組成。對于夾持式手部,進行設計選用時主要考慮以下幾點:

手部應有適當的夾緊力和驅動力;
手指應具有足夠的開閉范圍;
手指對制品應有夾持精度;
手部對制品應具有適應能力,且要求手部能耐受注塑制品剛從模具取出時的高溫及腐蝕性。
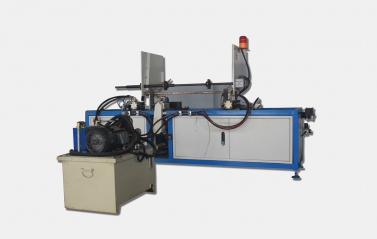
驅動系統:為執行系統的各部件提供動力的系統,有氣動、液壓、電動及機械等形式,目前比較常用的是氣動和電動兩種形式。氣動式速度快、結構簡單、成本低,有較高的重復定位精度;電動式可實現連續控制,定位精度高,但所需成本較高。
在設計選用驅動系統時應注意幾點:
根據機械手的負載量來確定驅動系統的類型。一般來說,重負載的機械手可選擇液壓驅動系統,中負載的可選擇電動驅動系統,輕負載的可選擇氣壓驅動系統。
對于做點位控制的注塑機械手多采用氣壓驅動系統。
對于需在采用伺服控制的機械手多采用液壓驅動系統或電力驅動系統。
控制系統:能過對驅動系統進行控制,使執行系統按照預定的工作需求進行操作,并對執行系統的動作進行自我修正的系統。一般包括位置栓測裝置和過程控制部份,通常采用點位控制和連續軌跡控制兩種方式。
注塑用機械手的所有動作都在控制系統的指揮下完成,尤其是機械手與注塑機的協調工作關系,更是要依賴控制系統來達到。在控制系統的指揮下,機械手按照預定的工作程序完成各個動作,從而將注塑生產出的制品從模具中取出,并傳送到指定地點或下一個生產工序中,并向模具中噴灑脫模劑。
主要工作步驟與內容:
機械手一般是固定于成型機固定側上方,也有部份側取式機械固定在門側,但工作步驟與內容均相同。當注塑機完成開模動作,將模具頂針頂出后此時會將完成信號釋出給機械手,機械手則開始將手臂伸放模板中心空間進行取出動作,爾后上升至原點位置,并將完成取出動作信號回傳給注塑機,注塑機立刻再進入循環生產動作。然手利用合模注塑時間將成品置放至已設定的固定位置,再回到原點位置等待下一階段的循環。
使用機械手所帶來的效益:
在注塑中使用機械手取出對象除了節省人力外,在產品的品質上也可獲得大幅的提升。由于用人力取出會面臨人力疲乏的問題,使得開閉模時間不定,繼而影響原料在料管加熱的時間及模具本身應保持的溫度,終使得原本設定的條件及參數遭致改變,接著所生產的產品也就可想而知了。若以機械人取出方式生產,除了能克服上述不良因素外,也可使用每日的產能,均能作數據條件化的統計,使管理者在人員及工時上的安排更為便利。
有形的效益:在傳統的生產模式里需用上大量的員工及管理者,但在機械自動化的設備標準化后,節省了人力及人事的開銷及管理上層的問題,在制造成本上也大幅的降低,也較具備競爭力。
 在線咨詢
在線咨詢